四、TacoAI 应用
先安装 tps-test 下载测试资源:
sudo apt update
sudo apt-get install tps-test
测试资源位于 /usr/data 目录下:
root@taco-dk:~# ls /usr/data/
automation ffmpeg ids otp taco-pipeline-1.0.0 venc
deb fio libcv performance_test tps_pipeline
distro gmac multicore sound usb
dvfs gpiozero npu suspend vdec
4.1 编码
视频编码测试命令是 taco_venc_simple_example,主要用于将 YUV 数据编码成 H.264 数据。测试资源为 /usr/data/venc/1920x1080_420p_10f.yuv(10 帧,1080P,YUV420p 格式数据)。使用说明如下:
taco_venc_simple_example encode <线程数> <编码周期> <循环次数> <帧数> <保存文件>
参数说明:
encode:指定编码操作线程数:指定用于编码的线程数量编码周期:每个线程编码操作的周期数循环次数:每个周期中要编码的循环次数帧数:每个循环中要编码的帧数保存文件:是否将编码后的文件保存到磁盘
示例命令:
root@taco-dk:~# taco_venc_simple_example encode 4 1 1 10 1
NOTE: Using useExternal=1 (direct buffer access) for encoding test
TACO VENC Multi-threaded Test Configuration:
Threads: 4
Encoder cycles: 1
Loops per encoder: 1
Frames per loop: 10
Save file: yes
Total frames per thread: 10
Thread 0 - Cycle 1 - Loop 1: FPS: 60.83, Frames: 10, Streams: 10
Thread 0: Completed
Thread 3 - Cycle 1 - Loop 1: FPS: 60.10, Frames: 10, Streams: 10
Thread 1 - Cycle 1 - Loop 1: FPS: 60.67, Frames: 10, Streams: 10
Thread 1: Completed
Thread 3: Completed
Thread 2 - Cycle 1 - Loop 1: FPS: 57.51, Frames: 10, Streams: 10
Thread 2: Completed
All threads completed
输出文件为 output_thread_x.h264:
root@taco-dk:~# ls
a.out da_pec_u0 output_thread_2.h264 test
core output_thread_0.h264 output_thread_3.h264 test.c
da_gc_u output_thread_1.h264 regress97_riscv.tar.gz
输出日志解析:
- 编码配置:显示多线程编码的配置信息,包括线程数、编码周期、循环次数和帧数。
TACO VENC Multi-threaded Test Configuration:
Threads: 4
Encoder cycles: 1
Loops per encoder: 1
Frames per loop: 10
Save file: yes
Total frames per thread: 10
- 编码性能:显示每个线程在每个周期和循环中的编码帧率(FPS)和处理的帧数。
Thread 0 - Cycle 1 - Loop 1: FPS: 60.83, Frames: 10, Streams: 10
Thread 3 - Cycle 1 - Loop 1: FPS: 60.10, Frames: 10, Streams: 10
Thread 1 - Cycle 1 - Loop 1: FPS: 60.67, Frames: 10, Streams: 10
Thread 2 - Cycle 1 - Loop 1: FPS: 57.51, Frames: 10, Streams: 10
- 编码完成:所有线程编码完成后的提示。
All threads completed
4.2 解码
视频解码测试命令是 ppvdec,主要用于将 H.264、H.265 或 JPEG 数据解码成 YUV 或 RGB 数据。测试资源位于 /usr/data/vdec 目录下。使用说明如下:
ppvdec decode_mode <线程数> <循环次数> <解码周期> <帧数> <保存文件> [解码类型] [分辨率] [PP模式]
参数说明:
线程数:解码线程数量(1-32)循环次数:外层循环数量解码周期:每个线程的解码循环数量帧数:每轮循环需要解码的帧数保存文件:1 = 保存 YUV 文件,0 = 不保存解码类型:0 = H.264,1 = H.265(可选参数,默认值为 0)分辨率:0 = 1080p,1 = 4K(可选参数,默认值为 0)PP模式:0 = 仅 PP0,1 = 仅 PP1,2 = 双通道(可选参数,默认值为 0)
示例命令:
root@taco-dk:~# ppvdec decode_mode 1 1 1 10 1 0 0
Signal handlers installed (SIGINT, SIGTERM)
=== [ppvdec running from test_taco_vdec.c] ===
=== Legacy Mode Configuration ===
Codec: H.265
Resolution: 1080p
PP Channel: Channel0 only
Save YUV: Enabled
Stream Files Used:
H.264 1080p: /usr/data/vdec/stream_1920x1080.h264
H.264 4K: /usr/data/vdec/stream_3840x2160.h264
H.265 1080p: /usr/data/vdec/stream_1920x1080.h265
H.265 4K: /usr/data/vdec/stream_3840x2160.h265
Starting single decode thread (no pthread)...
Thread 1 - PP Channel Configuration: mode=0, ch0=enabled, ch1=disabled
Thread 1 - Parsing stream file: /usr/data/vdec/stream_1920x1080.h265
Parsing H.265/HEVC format
Parsed 1000 frames from video file
Thread 1 Loop 1: FPS: 9.42
Thread 1: 1 frames, FPS: 9.23
PASS
输出日志解析:
- 解码线程配置:显示每个线程的配置信息,包括模式和通道状态。
Thread 1 - PP Channel Configuration: mode=0, ch0=enabled, ch1=disabled
Thread 1 - Parsing stream file: /usr/data/vdec/stream_1920x1080.h264
- 帧解析:显示从视频文件中解析的帧数。
Parsed 1000 frames from video file
- 解码性能:显示每个线程的解码帧率(FPS)。
Thread 1 Loop 1: FPS: 44.44
Thread 1: 10 frames, FPS: 43.90
4.3 NPU 模型运行
本例程基于官方 YOLO11 模型,经过优化和适配,可在 EM20-DK 硬件平台上高效运行,用于实现对 80 种常见物体的实时检测。本例程提供的预编译模型为 UINT8 量化模型(.nb 格式),旨在平衡检测精度与推理速度。项目代码通过 taRuntime 加载并执行 .nb 模型,利用 OpenCV 进行图像的预处理和后处理。
4.3.1 测试环境准备
准备一台 PC 作为 host 机,并配备 Ubuntu 系统和 Python 环境。EM20-DK 平台作为 device 机,已预装 Ubuntu 系统和 SDK。
访问 Model Zoo 官方 Gitee 或 Model Zoo 官方 Github,下载官方提供的算法示例。
以 YOLO11 模型为例,通过运行 samples/YOLO11_det/scripts/ 目录下的 download.sh 脚本,获取例程所需的模型、数据与脚本等内容。
chmod +x download.sh && ./download.sh
下载内容:
models/
├── datasets.txt
├── yolo11s_float16.nb
├── yolo11s.onnx
├── yolo11s_int8.nb
├── yolo11s_config_fp16.json
└── yolo11s_config_int8.json
test_images/ # 测试用图片
├── input1.jpg
├── input2.jpg
├── input3.jpg
├── input4.jpg
└── input5.jpg
datasets/
├── val2017_1000 # coco val2017中随机抽取的1000张样本
└── instances_val2017_1000.json # coco val2017中随机抽取的1000张样本对应的标注信息
通过 TACO SDK 搭建交叉编译环境,使用交叉编译工具链编译生成可执行文件 yolo11s_det_soc:
cd cpp
mkdir build && cd build
cmake ..
make
在 EM20-DK 板端新建模型文件夹 yolo11,并通过 scp 命令将数据从 host 机复制到该目录下,复制完成后 yolo11 目录结构如下:
yolo11
├── test_images # 测试集图片
│ ├── input1.jpg
├── models
│ └── yolo11s_int8.nb # .nb 模型
| └── yolo11s_float16.nb
└── yolo11s_det_soc # 例程程序
4.3.2 单图推理
YOLO11s UINT8 模型
在 yolo11 目录下运行 UINT8 模型:
root@taco-dk:~/yolo11# ./yolo11s_det_soc --input=test_images/input1.jpg --model=models/yolo11s_int8.nb
--------------------------------------
Single Image Inference Mode
Model: models/yolo11s_int8.nb
Input: test_images/input1.jpg
Output: output.jpg
Conf thresh: 0.25
NMS thresh: 0.45
--------------------------------------
Input num: 1, Output num: 3
--------------------------------------------------------------
Tensor Attribute index: | 0
dim_count: | 4
dim_size: | [640, 640, 3, 1]
data_format: | 3
quant_format: | 2
quant_data (dfp):
fixed_point_pos: | 998277230
quant_data (affine):
tf_scale: | 0.003922
tf_zero_point: | -128
name: | uid_30000_out_0
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 0
dim_count: | 3
dim_size: | [6400, 144, 1]
data_format: | 3
quant_format: | 2
quant_data (dfp):
fixed_point_pos: | 1044353412
quant_data (affine):
tf_scale: | 0.187079
tf_zero_point: | 23
name: | uid_30001_out_0
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 1
dim_count: | 3
dim_size: | [1600, 144, 1]
data_format: | 3
quant_format: | 2
quant_data (dfp):
fixed_point_pos: | 1048615530
quant_data (affine):
tf_scale: | 0.251178
tf_zero_point: | 66
name: | uid_30002_out_0
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 2
dim_count: | 3
dim_size: | [400, 144, 1]
data_format: | 3
quant_format: | 2
quant_data (dfp):
fixed_point_pos: | 1046139268
quant_data (affine):
tf_scale: | 0.213690
tf_zero_point: | 70
name: | uid_30003_out_0
--------------------------------------------------------------
Model initialized successfully
[INFO] Using : DMA-BUF Heaps
[TACO] INFO: taco system initialized successfully
--------------------------------------
Detected 16 objects
===== Time Statistics =====
Image read time: 113.72 ms
Preprocess time: 89.49 ms
Inference time: 15.48 ms
Postprocess time: 57.66 ms
Total time: 276.36 ms
============================
Output saved to: output.jpg
--------------------------------------
Model deinitialized
输出日志解析:
- 使用模型:models/yolo11s_int8.nb
- 输入图像:test_images/input1.jpg(input1.jpg 可换成自定义 jpg 文件)
- 输出图像:output.jpg
- 输入图像的尺寸:640x640 像素(预处理后)
- 性能统计:
- 读图+解码: 113.72 ms,占比 41.14%
- 预处理:89.49 ms,占比 32.38%
- npu推理:15.48 ms,占比 5.60%
- 后处理:57.66 ms,占比 20.86%
- 总耗时:276.36 ms
- 检测结果:共 16 个对象,置信度 ≥ 0.25
- Inference FPS:≈ 64.6 fps(1000/15.48)
- 端到端 FPS:≈ 3.6 fps(1000/276)
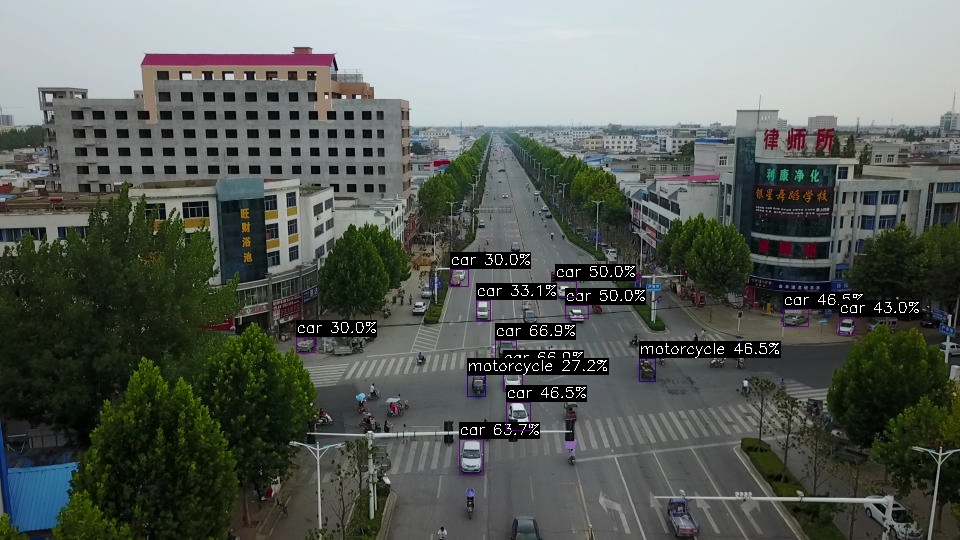
- 状态:PASS
生成结果
YOLO11s FP16 模型
在 yolo11 目录下运行 FP16 模型:
root@taco-dk:~/yolo11# ./yolo11s_det_soc --input=test_images/input1.jpg --model=models/yolo11s_float16.nb
--------------------------------------
Single Image Inference Mode
Model: models/yolo11s_float16.nb
Input: test_images/input1.jpg
Output: output.jpg
Conf thresh: 0.25
NMS thresh: 0.45
--------------------------------------
Input num: 1, Output num: 3
--------------------------------------------------------------
Tensor Attribute index: | 0
dim_count: | 4
dim_size: | [640, 640, 3, 1]
data_format: | 1
quant_format: | 0
quant_data (dfp):
fixed_point_pos: | 0
quant_data (affine):
tf_scale: | 0.000000
tf_zero_point: | 0
name: | input/output[0]
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 0
dim_count: | 3
dim_size: | [6400, 144, 1]
data_format: | 1
quant_format: | 0
quant_data (dfp):
fixed_point_pos: | 0
quant_data (affine):
tf_scale: | 0.000000
tf_zero_point: | 0
name: | uid_5_out_0
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 1
dim_count: | 3
dim_size: | [1600, 144, 1]
data_format: | 1
quant_format: | 0
quant_data (dfp):
fixed_point_pos: | 0
quant_data (affine):
tf_scale: | 0.000000
tf_zero_point: | 0
name: | uid_4_out_0
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 2
dim_count: | 3
dim_size: | [400, 144, 1]
data_format: | 1
quant_format: | 0
quant_data (dfp):
fixed_point_pos: | 0
quant_data (affine):
tf_scale: | 0.000000
tf_zero_point: | 0
name: | uid_3_out_0
--------------------------------------------------------------
Model initialized successfully
[INFO] Using : DMA-BUF Heaps
[TACO] INFO: taco system initialized successfully
--------------------------------------
Detected 16 objects
===== Time Statistics =====
Image read time: 90.98 ms
Preprocess time: 44.19 ms
Inference time: 24.61 ms
Postprocess time: 51.13 ms
Total time: 210.91 ms
============================
Output saved to: output.jpg
--------------------------------------
Model deinitialized
输出日志解析:
- 使用模型:models/yolo11_float16.nb
- 输入图像:test_images/input1.jpg(input1.jpg 可换成自定义 jpg 文件)
- 输出图像:output.jpg
- 输入图像的尺寸:640x640 像素 (预处理缩放后)
- 性能统计:
- 读图+解码:90.98 ms,占比 43.1%
- 预处理:44.19 ms,占比 20.95%
- npu推理:24.61 ms,占比 11.67%
- 后处理:51.13 ms,占比 24.28%
- 总耗时:210.91 ms
- 检测结果:共 16 个对象(置信度 ≥ 0.25)
- Inference FPS:≈ 40.7 fps(1000/24.61)
- 端到端FPS:≈ 4.7 fps
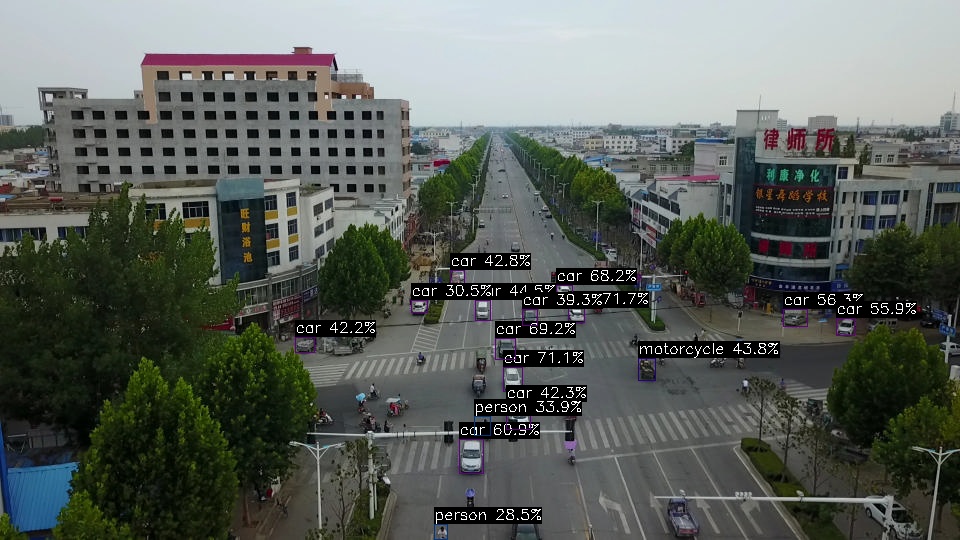
- 状态:pass
生成结果
4.3.3 模型性能评测
基于单图推理测试结果,我们对 2 个模型进行了性能对比分析:
性能对比表格
| 模型名称 | 输入图像 | 输出图像 | 读码解码时间 | 预处理时间 | NPU推理时间 | 后处理时间 | 总耗时 | INFERENCE FPS | 端到端FPS |
|---|---|---|---|---|---|---|---|---|---|
| YOLO11s UINT8 | input1.jpg | output.jpg | 113.72 | 89.49 | 15.48 | 57.66 | 276.36 | 64.6 | 3.6 |
| YOLO11s FP16 | input1.jpg | output.jpg | 90.98 | 44.19 | 24.61 | 51.13 | 210.91 | 40.7 | 4.7 |
总结
- INT8 推理核心仅 15.48 ms,比 FP16 快 9 ms(≈ 59 %)。
- 前后处理占比过大 → 后续优化应聚焦 pipeline 加速(DMA-BUF、双线程、降低输入分辨率)。